Gabrielle Murphy (insertion of graphs, objective, creation and insertion of data table, deformation vs. height in conclusion, quantitative models in conclusion, force vs. spring deformation in conclusion), Ryan Partain (creation of graphs, sources of error, beginning of deformation vs. speed in conclusion, force vs. spring deformation in conclusion), Trey Seabrooke (procedure), Tyler Kolby
Objective:
To determine the mathematical and graphical relationship between the distance the spring is compressed (deformation of the spring) and the force of the spring, the maximum velocity, and the maximum height.
Procedure:
1. Set up an apparatus including: a track(angled 1.2° up from parallel to the ground), a cart, a spring, a force probe attached to the spring, and a motion detector.
2. Place the spring where the track forms the angle with the horizontal. Attach the force probe to the spring.
3. Carefully rest the cart on the spring, with 0 compression of the spring. This is the starting position.
4. Start the motion detector.
5. Compress the spring by pushing the cart against it.
6. Release the cart and record data gathered by the force probe and the motion detector.
7. Repeat steps 3-6 with decreasing compression (less force applied to cart) of the spring each successive time until enough data is collected for the experiment to be valid.
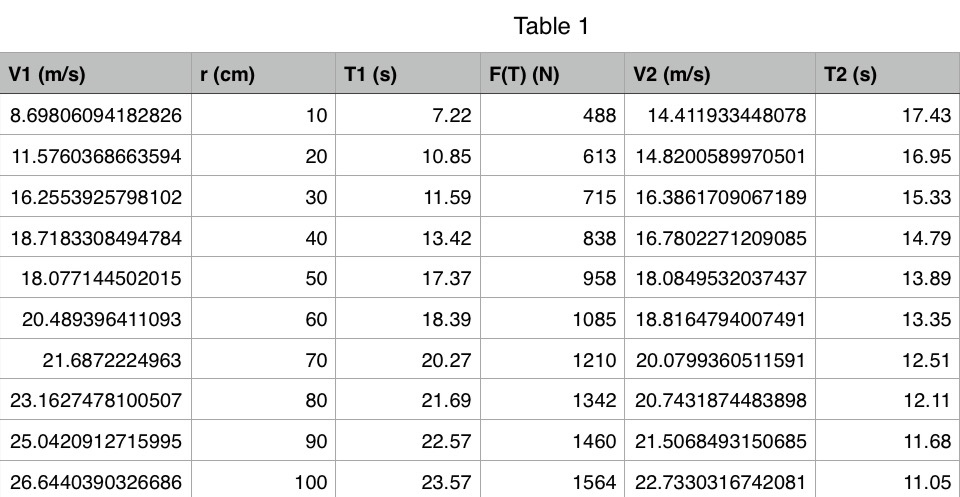
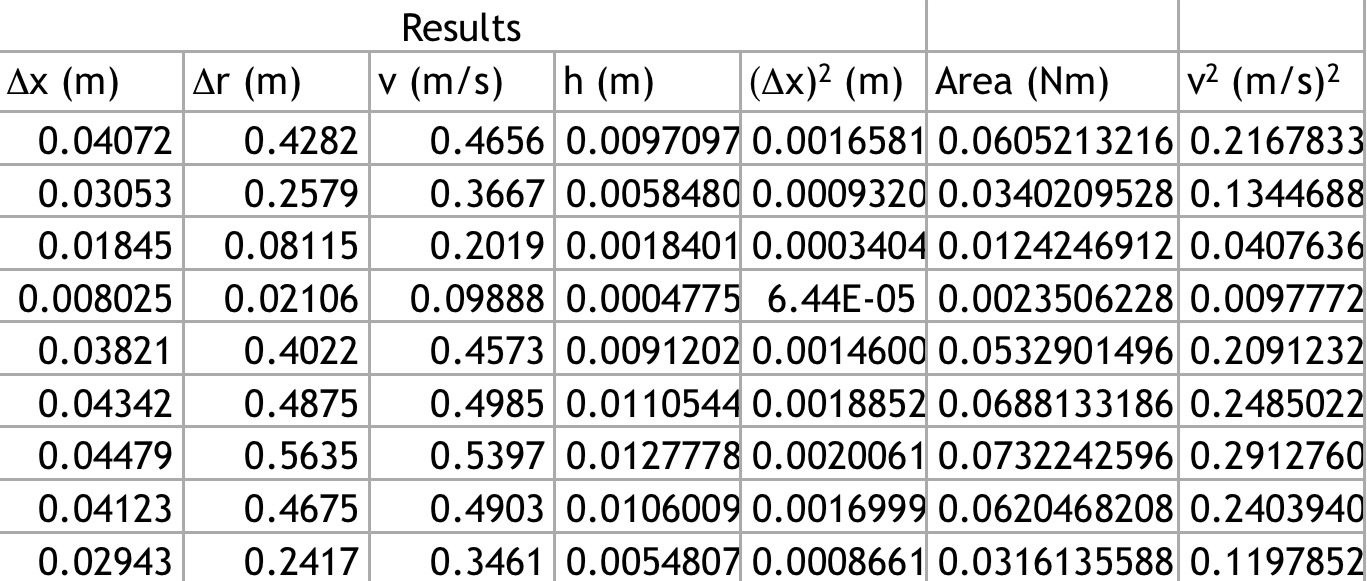
Data Table:
Figure 1
Graphs:
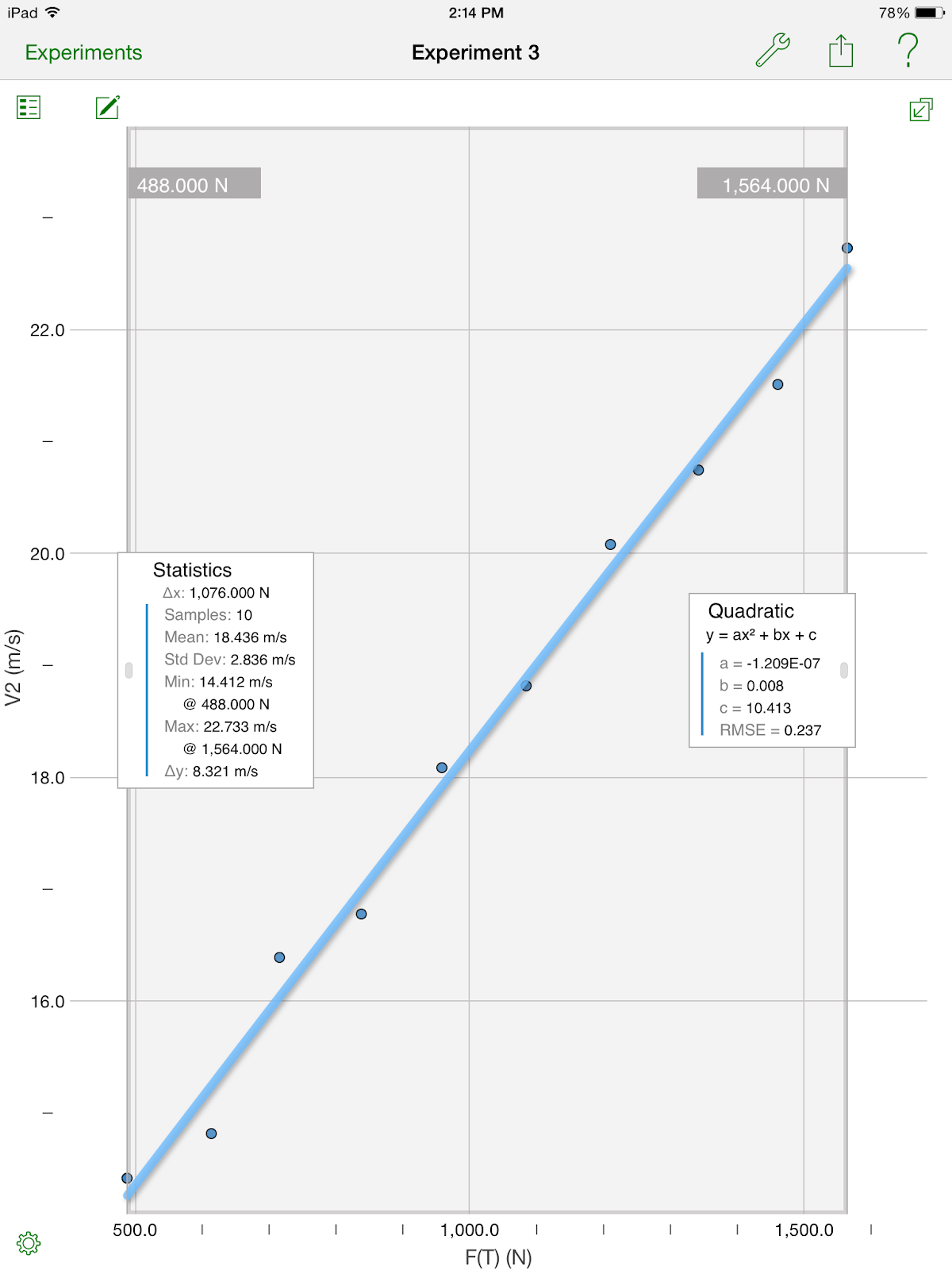
Force vs Deformation (Figure 2)
Position (r)vs Time (Figure 3)
Time (s)
Velocity vs Time (Figure 4)
Height vs Deformation (Figure 5)
Height vs Area (Figure 6)
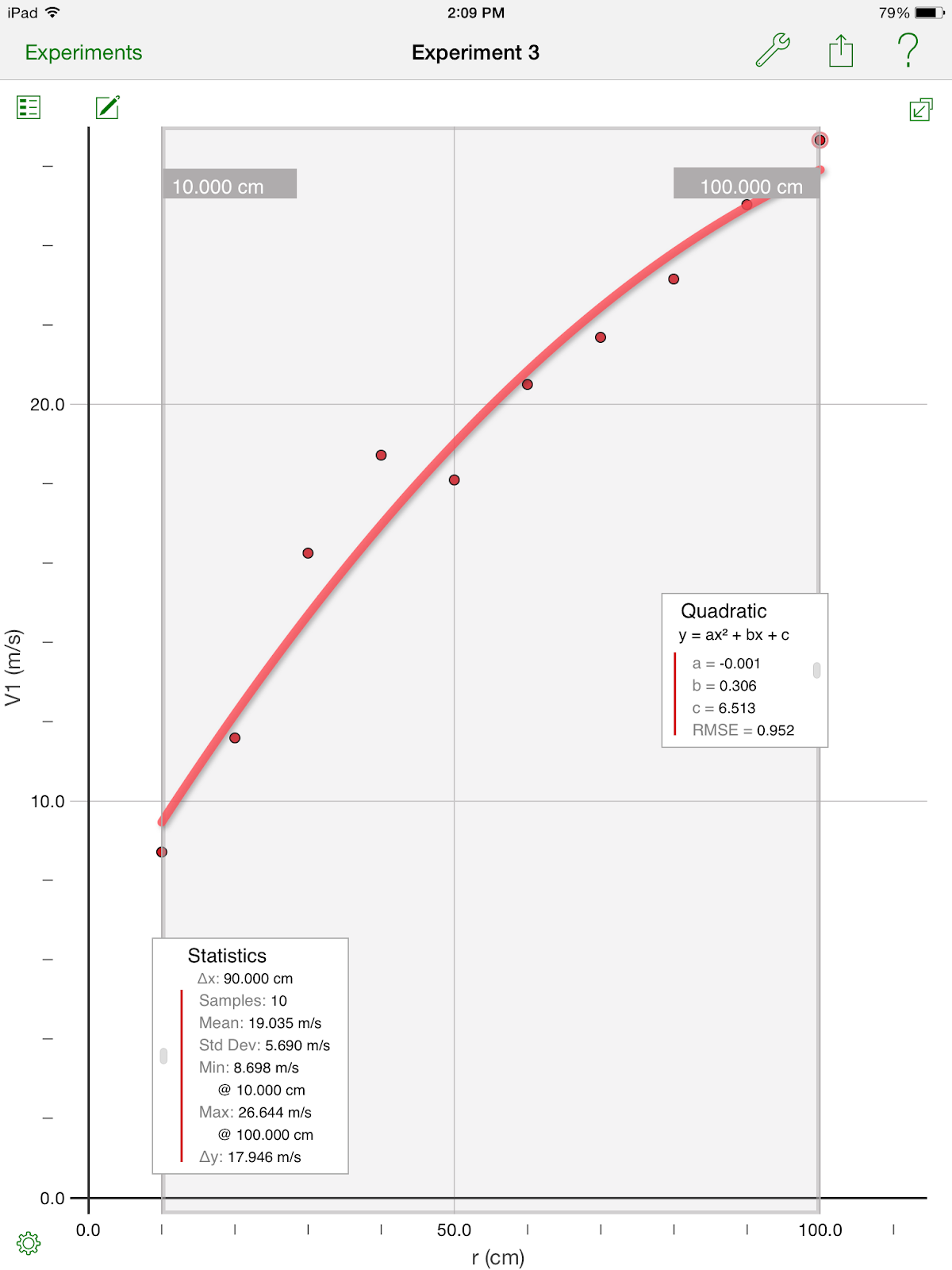
Velocity vs Deformation (Figure 7)
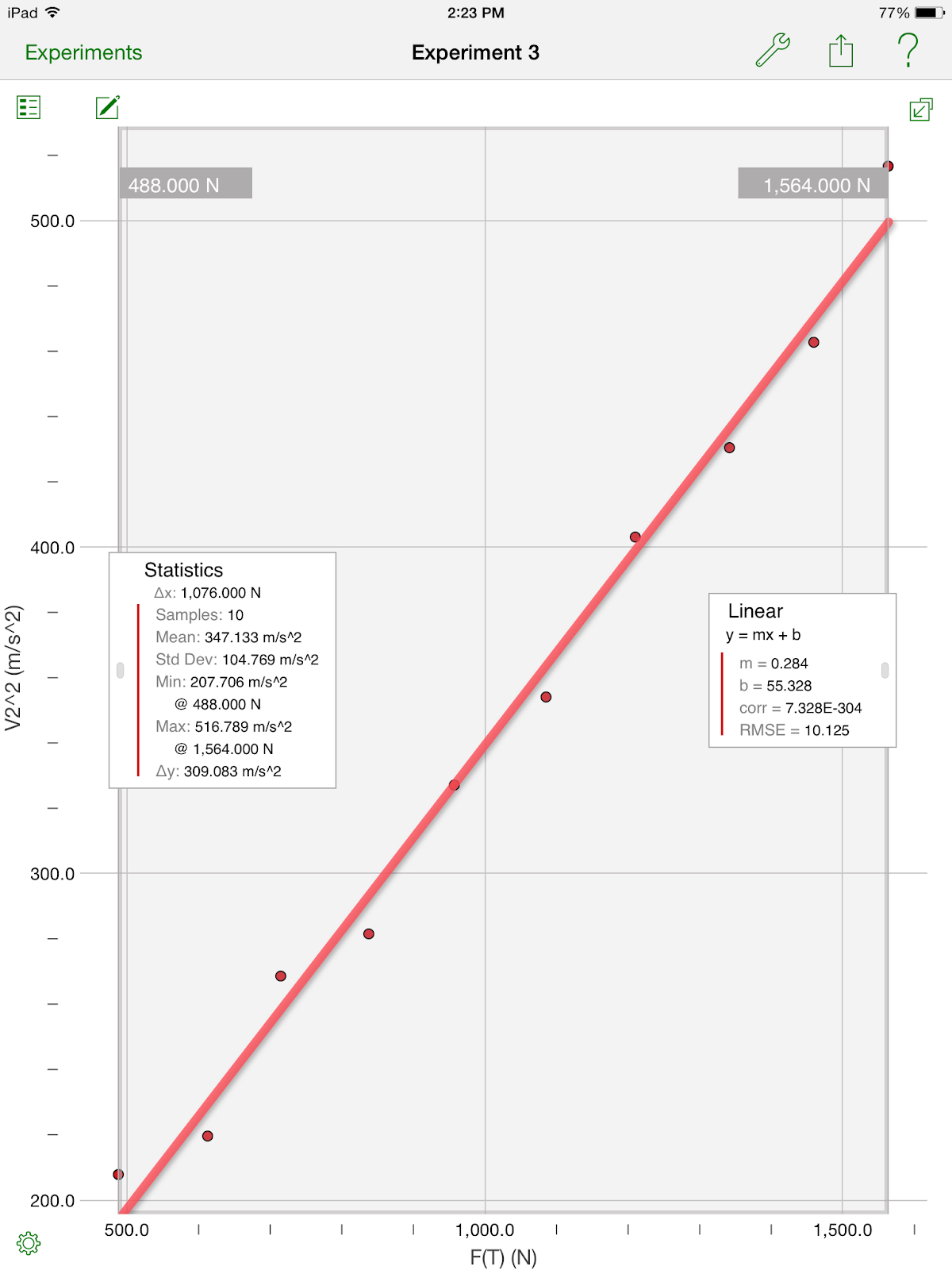
Velocity^2 vs Area (Figure 8)
Conclusion:
DEFORMATION VS FORCE
In this experiment, the force exerted on the spring was measured using a force probe attached to the spring. The force required to compress the spring, measured by the force probe, is directly proportional to the distance the spring was compressed, x. In other terms, the force and spring deformation are directly proportional (as force increases, the spring deformation increases in the opposite direction). Because force and spring deformation are directly proportional, the graph is linear (Fig. 2) and it is in Quadrant II. The slope can be found by the force divided by the spring deformation (N/m). The slope of this graph, represented by the letter k, is the spring constant. The equation created by the force vs spring deformation graph is F=k(x) where k represents the “stiffness” of the spring, or how much the spring resists deformation by a force exerted on it.
The area of the graph can found by multiplying F and x. Because the graph makes a triangle, the area of a triangle equation can be used:
A=(½)bh
where b is substituted by xand h is substituted by F. It can be represented by the equation:
A=(½)xF
Because F= k(x), F can be substituted by k(x) in the area equation. The new equation becomes
A=(½)k(x)^2
This area represents the force that the spring exerts on the cart (the system) that causes the displacement of the cart, which is the work done on the system by the spring. When the system does not include the spring, the equation is
W=(½)k(x)^2
In a system that includes the spring, the energy in the spring is called elastic energy, or U(el). The general equation becomes
U(el)= (½)k(x)^2
DEFORMATION VS HEIGHT
The Position vs Time graph (Fig. 3) can be used to find the relationship between spring deformation (dependent variable) and the maximum height the cart reached as a result (independent variable). Because the track was at an angle, the distance the cart travels on the track, r, can be broken down into two components: xand y where x is the horizontal distance and y is the vertical distance. x, the change in the horizontal, is also the deformation of the spring because it is the horizontal distance the cart and the spring moved when the spring was compressed. x can be found using the minimum value of the Position vs Time graph (Fig. 3) since the cart moves backwards and reaches its minimum position when the spring is at its maximum compression. r is the maximum value of the graph (Fig. 3) because it is the greatest distance traveled by the cart on the track and where it reaches its maximum position. Because the track formed an angle with the horizontal, y, the maximum height, can be found using trigonometry:
h= r(sin)
where =1.2° and r is the maximum of the Position vs Time graph:
h(max)=(0.242 m)(sin 1.2°)= 0.0051 m
The values for h found using the general equation h=r(sin 1.2°) can be graphed in terms of spring deformation, x to create the Height vs Deformation graph. This would produce a parabolic graphical relationship, as seen in the Height vs Deformation graph (Figure 5). The graph can be linearized by squaring the x-axis - x. The equation for this relationship is
h=NUMBERS(x)^2
The slope of the linearized graph of deformation vs height does not shed light on its relationship since there is no constant in the experiment that can be applied to the slope. Looking at the linearized graph, the height is quadrupled because xis squared. This can be compared to the Force vs Deformation graph (Fig. 2), since xis also a variable in that graph. When xis squared in the Force vs Deformation graph (Fig.2), force becomes squared (because of its linear relationship) and the area under that graph is quadrupled. The two variables affected by the squaring of xthe same way are then be compared to each other to see if there is a meaningful relationship between them: height and the area under the Force vs Deformation graph, or the work done on the system.
To compare Height vs Work,
This new relationship shows that deformation of the spring, which has a direct relationship with how much work the spring does on the cart, will affect the maximum height of the cart.
DEFORMATION VS SPEED
The Velocity vs Time graph (Fig. 3) can be used to find the relationship between spring deformation and the speed the cart traveled during the experiment. The initial negative velocity on the graph represents when the car was being pushed into the spring, compressing it. The sudden jump in the velocity is when the car was released from the spring, and it quickly reached its maximum velocity. Since the track was at a 1.2° angle, the cart slowed as it progressed up the ramp. The cart eventually reached a velocity of 0 m/s and then started traveling backwards with a negative velocity. In this experiment, the force of the spring decreased with each trial. This is the dependent variable, and it caused the velocity to change as a result. This causes the velocity to be the independent variable. These results were impacted by the shape of the ramp as well. Because the ramp was tilted at a 1.2° angle, it caused the cart to slow as time progressed. The acceleration was in the negative direction because of the Earth’s gravity. The forces acting on the cart were unbalanced, and gravity was the strongest, pulling the cart down. This caused the velocity to decrease, reach zero, and then increase in the negative direction as time progressed.
The equation derived from this graph (Fig. 3) is V(max)=
EQUATION MODELS
W=Fx
U(el)=(½)k(x)^2
U(g)=mgh
U(k)=(½)mv^2
SOURCES OF ERROR
During this experiment, many machines were used, and it relied less on human actions. This reduces the possibilities of errors in the experiment, but there are still possible sources present. The spring could have been compressed too much or not enough during the experiment. This would cause inaccurate readings on the force probe, which would lead to errors throughout the experiment. Since the distance the cart traveled was dependent on the distance the spring was compressed, this reading would also be inaccurate. Finally, the different amounts of forces applied to the spring could have been inconsistent. The force applied to the spring was supposed to decrease steadily and constantly, and it may not have been decreased constantly. This would be yet another source of error during the experiment.